This is an old revision of the document!
All the rgb-d cameras we have in the lab
Kinect v1 : Kinect 360
Libraries to use the kinect :
- to retrieve the informations from the kinect via ros opennilaunch
- detection of people via ros opennitracker
- return the position of the first user torso detected by the kinect opennitrackermodified
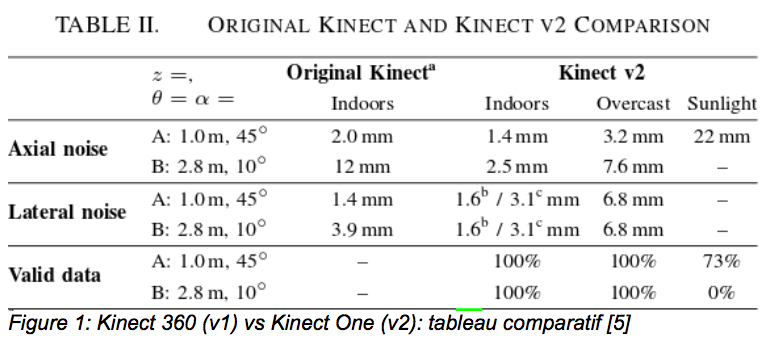
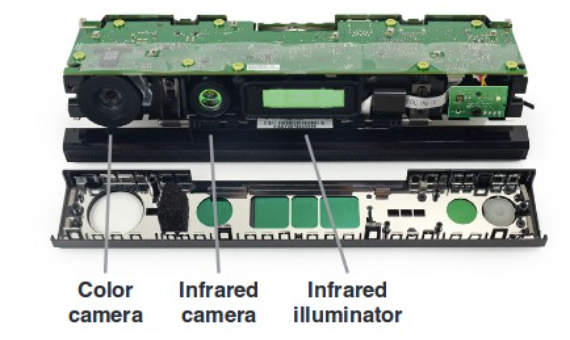
Kinect v2 : Kinect One
References
- To install on a macos : https://github.com/OpenKinect/libfreenect2
- Librairie Python pyfreenect2 pour utiliser les données libfreenect2 en python : https://github.com/tikiking1/pyfreenect2
- Librairie Python PyKinect pour utiliser les données Skeleton issues de la Kinect : https://pytools.codeplex.com/wikipage?title=PyKinect
- MichaelBloesch,PéterF ankhauser,MarcoHutter,RalfKaestner,DiegoRodriguez,RolandSiegwart. (2015). Kinect v2 for Mobile Robot Navigation: Evaluation and Modeling
- iFixit, “Xbox One Kinect Teardown,” https://www.ifixit.com/Teardown/ Xbox+One+Kinect+Teardown/19725, (Janvier 2015)
- Zennaro,S.(2014) EvaluationofMicrosoftKinect360andMicrosoftKinectOneforroboticsand computer vision applications. Università degli Studi di Padova. Thesis.
- Wiedemeyer, T. (2015) IAI Kinect2: Tools for using the Kinect One (Kinect v2) in ROS , https://github.com/code-iai/iaikinect2
- El-laithy, R.A., Huang, J., Yeh, M. (2012) Study on the Use of Microsoft Kinect for Robotics Applications. Proceedings of IEEE/ION PLANS 2012 , Myrtle Beach, South Carolina , April 2012, pp. 1280- 1288.
- Rosado, J.; Silva, F.; Santos, V. & Lu, Z. (2013), R eproduction of human arm movements using Kinect-based motion capture data., in 'ROBIO' , IEEE, , pp. 885-890 .
- Albrektsen, S. M. (2011) Using the Kinect Sensor for Social Robotics. NTNU – Trondheim. Thesis
Install on Linux
x-tion
Comparison