This is an old revision of the document!
Kinect and other rgbd-cameras
All the rgb-d cameras we have in the lab
Kinect v1 : Kinect 360
Libraries to use the kinect :
- to retrieve the informations from the kinect via ros opennilaunch
- detection of people via ros opennitracker
- return the position of the first user torso detected by the kinect opennitrackermodified
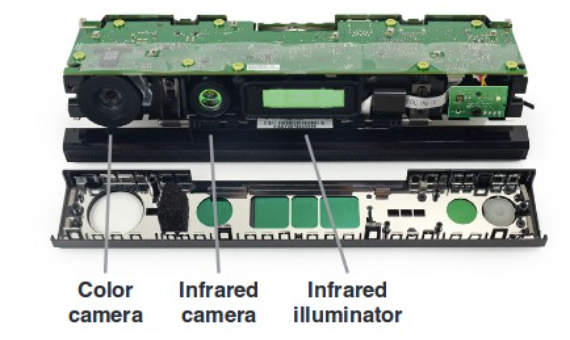
Kinect v2 : Kinect One
There is a current installation of Kinect for Windows SDK on the computer DELL.
References
- To install on a macos : https://github.com/OpenKinect/libfreenect2
- Librairie Python pyfreenect2 pour utiliser les données libfreenect2 en python : https://github.com/tikiking1/pyfreenect2
- Librairie Python PyKinect pour utiliser les données Skeleton issues de la Kinect : https://pytools.codeplex.com/wikipage?title=PyKinect
- MichaelBloesch,PéterF ankhauser,MarcoHutter,RalfKaestner,DiegoRodriguez,RolandSiegwart. (2015). Kinect v2 for Mobile Robot Navigation: Evaluation and Modeling
- iFixit, “Xbox One Kinect Teardown,” https://www.ifixit.com/Teardown/ Xbox+One+Kinect+Teardown/19725, (Janvier 2015)
- Zennaro,S.(2014) EvaluationofMicrosoftKinect360andMicrosoftKinectOneforroboticsand computer vision applications. Università degli Studi di Padova. Thesis.
- Wiedemeyer, T. (2015) IAI Kinect2: Tools for using the Kinect One (Kinect v2) in ROS , https://github.com/code-iai/iaikinect2
- El-laithy, R.A., Huang, J., Yeh, M. (2012) Study on the Use of Microsoft Kinect for Robotics Applications. Proceedings of IEEE/ION PLANS 2012 , Myrtle Beach, South Carolina , April 2012, pp. 1280- 1288.
- Rosado, J.; Silva, F.; Santos, V. & Lu, Z. (2013), R eproduction of human arm movements using Kinect-based motion capture data., in 'ROBIO' , IEEE, , pp. 885-890 .
- Albrektsen, S. M. (2011) Using the Kinect Sensor for Social Robotics. NTNU – Trondheim. Thesis
Install on Linux
Kinect Skeletal tracking
- Joints

- Joint hierarchy

- Hierarchical bone orientation: The orientation information is provided in form of quaternions and rotation matrices for use in different animation scenarios.
Bone rotation is stored in a bone’s child joint. For example, the rotation of the left hip bone is stored in the Hip Left joint. In the hierarchical definition, the rotation of the Hip Center joint provides the absolute orientation of the player in camera space coordinates. This assumes that the player object space has the origin at the Hip Center joint, the y-axis is upright, the x-axis is to the left, and the z-axis faces the camera.
- Reference to skeletal tracking and joint orientation:
x-tion
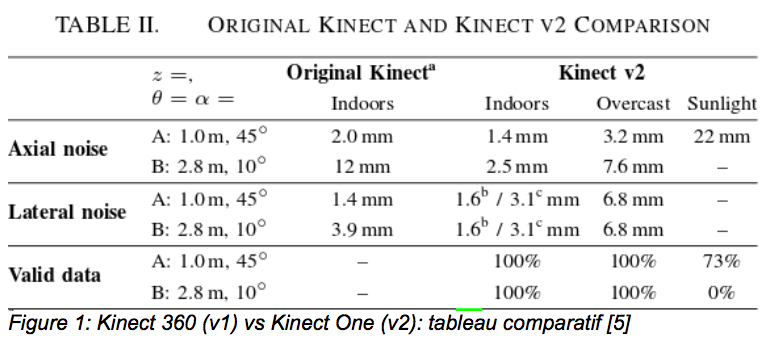
Comparison